目录
Zhu H, Cao C, Xia Y, et al. DSVP: Dual-stage viewpoint planner for rapid exploration by dynamic expansion[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021: 7623-7630. PDF
1. 概述
该论文提出了一种有效地探索高度复杂的环境的方法。该方法包括两个规划阶段:
- 探索阶段:在环境的自由空间中开发一个局部快速探索随机树(RRT),负责地图边界的扩展
- 重新定位阶段:通过映射环境维护一个全局图,将机器人转移到环境中不同子区域
- 机器人在两个阶段中来回切换,探索环境中的所有区域
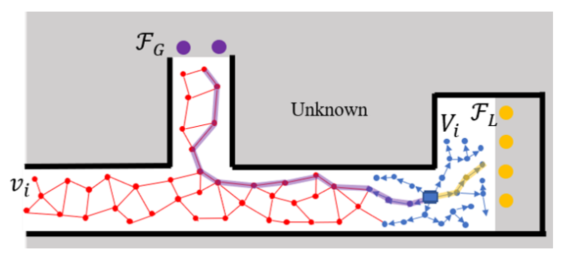
灰色区域:未知空间;黄色点:局部边界点;紫色点:全局边界点;蓝色方块:机器人;红色点线:全局地图;蓝色点线、箭头:局部树;黄色线:探索路径;紫色线:重定位路径
对RRT框架的扩展:
- 动态扩展:在RRT上被遮挡或超出规划范围的节点将被修剪。然后,在自由空间中采样新的节点。
- 混合边界:在与RRT节点相关的传感器范围以及机器人周围提取的边界。
2. 方法
在探索阶段,机器人视场内的边界以及RRT节点被提取为局部边界。
在重新定位阶段,全局边界由最新更新被清除的局部边界组成,帮助机器人从全局图中所有剩余的视点中选择最好的一个。
2.1 探索阶段
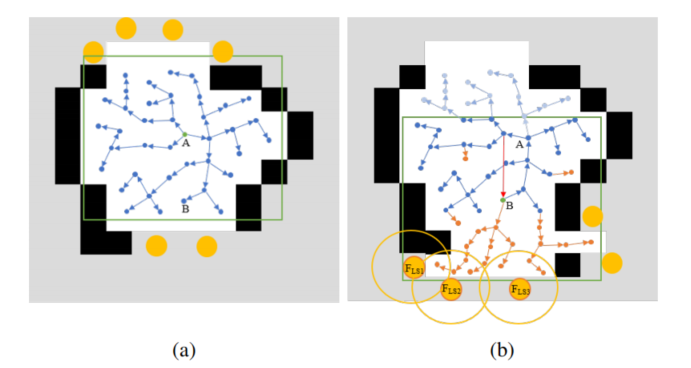
(a)为在前一次迭代中获得的RRT和局部边界。黄色圆圈是局部边界点。绿色方形表示规划范围。
(b)是当前迭代中生成的新RRT。蓝点代表来自上一次迭代RRT中的有用视点,橙色的点是新的采样视点。和、是三个选定的局部边界,用于指导局部树的扩展。黄色的空心圆圈是所选边界的传感器范围。
该阶段通过使用动态扩展的RRT,在每次迭代中生成机器人周围的视点。通过动态展开,每次迭代中只重新生成一小部分节点,与完全构建新树相比,计算量更少。在每次迭代开始时从所有局部边界中选择。然后,在的指导下,对前的树进行修剪重建后,对新的视点进行采样。

选择最佳分支进行下一步探索

动态扩展RRT
2.2 重定位阶段
当在探索范围内没有局部边界时,算法将从探索阶段切换到重定位阶段。
重定位阶段涉及到全局图和全局边界:
-
全局图的主要用途是记录在探索阶段采样的所有有价值的视点,并寻找两个视点之间的最短路径。因此在探索阶段的每次迭代中,会将具有正增益分支中的视点作为顶点添加到全局图中。
-
全局边界是由探索阶段被遗漏的局部边界组成的。可以通过全局图中的至少一个视点来观察到。每次更新局部边界时,它们都会被添加到中。

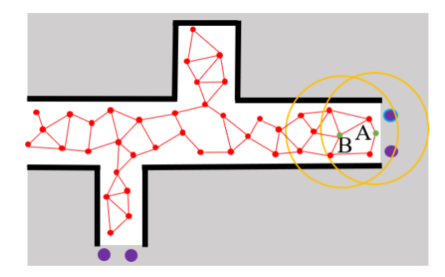
4-14行:从距离机器人的最近位置选取全局边界点,并记录观测到该边界点的第一个视点
15-23行:选择距离该边界点最近的视点,更新
寻找到后,机器人沿着重定位路径移动至该视点,切换到探索阶段
24行:如果不存在全局边界点,则结束探索
3. 实验
实验环境:cmu的室内、校园、车库环境
对比实验:NBVP、GBP、MBP

4. 总结
动态扩展降低构建RRT的运算量
混合边界点确保对环境的完全覆盖
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!