目录
Cao, Chao, et al. "Autonomous exploration development environment and the planning algorithms." 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022.PDF
1. 概述
自主探索开发环境是一个开源的存储库,旨在促进高级规划算法的开发和完整的自主导航系统的集成。该存储库包含具有代表性的模拟环境模型、基本的导航模块,例如,局部规划器、地形可遍历性分析、路径点跟踪和可视化工具。
通过TARE规划器、FAR规划器组成一个完整的基于几何的导航规划算法堆栈;结合三个存储库,集成一套基于地面车辆的三维激光雷达导航算法。

该论文提供的存储库构成了一个三层导航系统的中间层和顶层。用户可以使用底层接口集成存储库,即状态估计和运动控制,或者使用环境模型在模拟中运行存储库。
2. 开发环境
在开发环境中,该论文提供了五种环境模型、基本的导航模块和可视化和调试工具。
2.1 环境模型
五种环境模型

模型特征

2.2 局部规划器
局部规划器需要保证到达高级规划器发送的路径点的安全。该模块预先计算一个运动原语库,并将运动原语与车辆附近的三维位置关联起来。当位置被障碍物占用的时候,模块可以在几毫秒内确定发生碰撞的运动原语。然后,该模块选择对路径点可能性最大的运动原语组。
红色区域就是选择出来的最大可能性路径。

2.3 地形穿越性分析
地形分析模块检查车辆周围局部地形的遍历性。构建可穿越性代价图,通过体素网格中数据点的分布估计地面高度,穿越成本越高,障碍高度越高。
红色区域为不可穿越地形。

2.4 可视化和调试工具
为了促进算法的开发,该论文提供了一套工具来可视化算法的性能。可视化工具显示了整体地图、被探索的区域和车辆轨迹。诸如所探索的体积、旅行距离和算法运行时等指标被绘制并记录到文件中。
3. 高级规划器
通常,高级规划者以较低的频率重新规划并提供长途路线,而低级导航模块则立即做出反应,跟随路线并避开障碍物。
3.1 TARE探索规划
TARE规划器是一个层次化的框架,它利用环境的两层表示,以多分辨率的方式规划探索路径。
全局规划粗糙路径,划分子空间;在子空间内规划详细路径。

3.2 FAR探索规划
FAR规划器是一个基于可见性图的规划器,它可以动态地构建和维护一个简化的可见性图以及导航。
青色线条为规划器构建的可见性图,蓝色线条为路径;(a)为未知环境,(b)为已知环境,在两类环境下进行探索的实验结果。

4. 实践
安全范围
局部规划器在车辆和路径点之间的距离上使用一个规划水平,保持车辆和路径点或障碍物的安全距离,可以通过调节安全距离来让车辆通过狭窄区域。
急转弯
高级规划器选择沿着车辆前方的路径的展望距离为路径点,并将路径点发送给局部规划器。为了防止在出现90°急转弯情况下,车辆出现反复移动,尽量在车辆视线范围内的路径起始段上选择路径点。
动态障碍
地形分析模块在动态障碍物移动后,通过光线追踪从地形图中消除动态障碍物。
探索车的基本系统示图
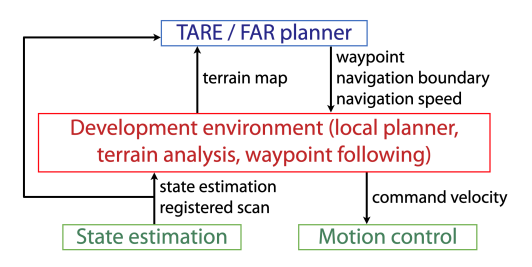
通过对基本系统的调整,可以实现对探索的改良。
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!