目录
Cao, Chao, et al. "TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments." Robotics: Science and Systems. 2021. 卡内基梅隆大学 PDF
1. 概述
自主探索存在的难点:
- 实时更新环境表示以跟踪已知区域
- 规划连续可遍历路径以指导探索
- 对于大型环境,需要确保对环境的完整探索
贡献点: 提出一种在复杂三维环境下的分层自主探索方法
- 一层密集维护数据,在局部范围内计算详细路径
- 一层稀疏维护数据,在全局范围内计算粗糙路径
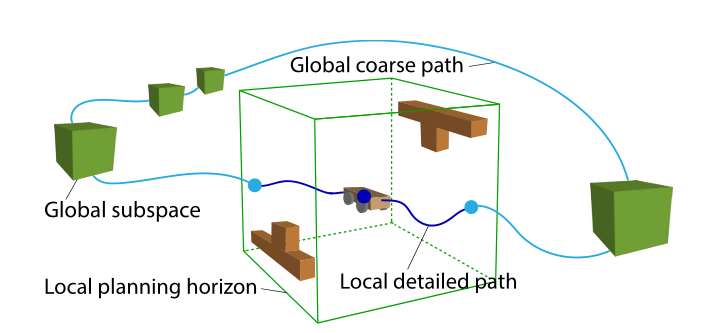
在绿色立方体内,对路径进行详细规划
离开子区域后,在自由空间进行移动,前往下一个需要详细规划的子区域
2. 方法
2.1 视点采样
计算局部路径,需要先对视点进行采样,由离散的点转换为路径


将局部区域、未覆盖面、当前视点和两个边界点作为输入,生成局部路径
首先在局部区域内生成一组候选视点,计算每个候选视点的奖励,以此作为优先级;进入K次迭代,每次迭代都会生成一条局部路径,选择最佳路径作为最终输出。在迭代中,每次概率选择一个视点,并更新其他视点的优先级。将采样所得视点,作为算法2的输入。
2.2 路径生成
给定一组采样视点,需要生成穿过每个视点的最佳路径
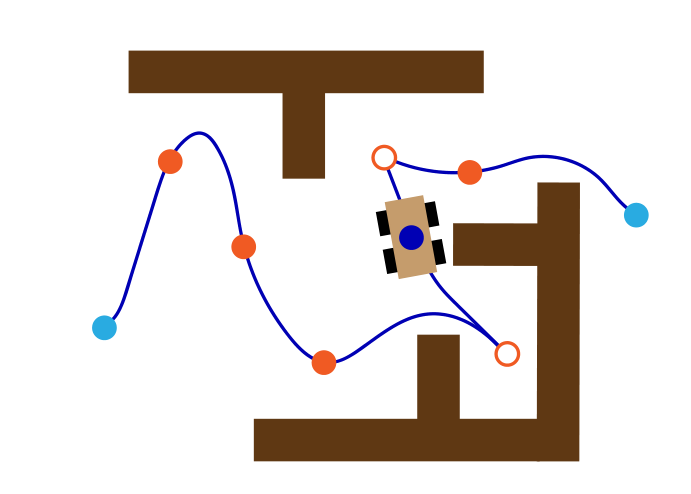

将局部区域、视点集作为输入,生成局部路径
首先通过算法计算每个视点对之间的最短距离,再由TSP算法计算通过每个视点的最短路径,将每个视点设置为断点后,进入平滑阶段。由于机器人需要在断点处停止,因此平滑阶段的主要任务是,尽可能将视点转为为内点。在平滑阶段,尝试将每个视点设置为内点,之后计算若该视点为内点的代价,如果代价更小,则进行转换。最终输出该视点集的最佳路径。
2.3 全局路径规划
在局部空间中需要进行详细规划,在全局空间中,要对多个子区域进行粗略规划,找到一条全局路径。

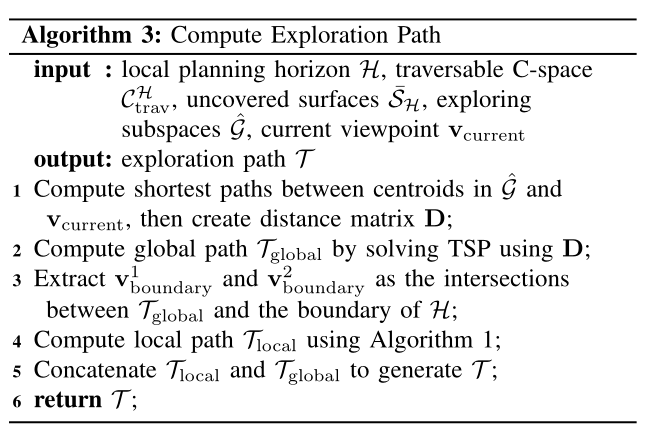
在全局规划中,将子空间的质心作为视点,同样使用算法计算质心之间的最短距离,再通过TSP算法规划最短路径。提取出局部空间与全局空间的两个边界视点,再由算法1对局部路径进行详细计算,最终将全局和局部路径进行合并,生成最终路径。
3. 实验
实验环境: 使用地面和空中机器人进行评估
- 地面机器人探索复杂的多仓库建筑内部环境
- 空中机器人探索大型室外环境
对比实验: NBVP、GBP、MBP
- 表1比较了每秒探索效率和相对比值
- 表2展示了在该方法中,主要的时间消耗在局部路径规划,并且不会由于环境复杂度的提高而产生不同的代价规模
- 表3展示不同的局部空间范围对实验的影响,随着范围的扩大,局部规划的计算量会不断增加

实验结果: 相比于之前最先进的方法,在计算量降低50%以上的情况下,探索效率提高了80%
4. 结论
采用分层框架,对局部数据进行详细处理,对全局数据进行粗略处理,可以有效提高整体效率
动态TSP方法可以用于求解视点集的最短遍历顺序,减低探索代价
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!