目录
Huang J, Zhou B, Fan Z, et al. FAEL: Fast Autonomous Exploration for Large-scale Environments With a Mobile Robot[J]. IEEE Robotics and Automation Letters, 2023, 8(3): 1667-1674. 中山大学 PDF
1. 摘要
问题:
- 大规模环境下的算力问题
- 算力不够导致无法高频进行规划,不能对环境变换做出及时应对,即无法选择出合适路径
- 路径选择不当会使机器人获取信息的速度变慢,甚至重复访问相同的地点,严重降低了勘探效率
贡献点:
- 提出一种对环境信息的快速预处理 -> 为了高频规划
- 提出一种综合考虑快速探索的关键因素的路径优化公式,以及一种近似算法来求解np困难优化问题 -> 优化路径,选择合适的
- 进行了广泛的模拟和真实世界的实验,展示所提出方法的计算效率
整体上提出了一个探索大规模未知环境的系统框架
2. 方法
用于三维空间表示的三维网格图由SLAM结果进行更新。地形图是通过根据点云进行遍历性分析得到的二维网格图。在三维网格图中,边界会被快速检测到。基于地形图、三维网格图和边界,对候选视点进行采样,并以有效的增量方式评估其信息增益。

浅蓝色为自由空间路线图,深蓝色为下一步路径,黑色为轨迹,绿色为边界,粉色为视点
扩展了一个稀疏的自由空间路线图来进行快速路径规划,基于视点和路线图,结合移动距离、信息增益和全局覆盖范围的最优路径等因素进行考虑,得到有效的路径优化。
2.1 3D表示和地形图
使用三维占用网格地图UFOMap来表示三维环境,其作为OctoMap的扩展,具有更快的遍历能力
为了确保安全探索,将地形图划分为安全区域和不安全区域,随着机器人的移动逐步构建地形图,通过确定点之间的最大高度差是否低于阈值t来检测地面和障碍物。
2.2 环境信息的快速预处理

算法依赖于边界信息、视点、信息增益和视点之间的移动距离,为了达到高频规划的目的,需要对上述信息进行预处理:
- 边界检测:为了避免搜索整个地图,只需要检测UFOMap记录的新更新的网格和机器人周围现有的边界
- 视点生成和增益评估:将视点可以观察到的边界单元的数量作为信息增益度量(在新的位置,以d为半径均匀采样,将视点与可观测边界连接,评估它们的信息增益)
- 稀疏路线图中的移动距离:为了保证路线图的稀疏性和计算量,将距离路线图G最近节点的距离大于ξ的每个采样点依次添加到路线图中,再通过检查地形图中的可达性,将最多n个采样点连接到路线图节点
2.3 路径优化
提出了一种同时考虑运动距离、信息增益和覆盖范围的路径优化方法,以有效地确定探索路径。
相比于TARE的一个关键的区别是,FAEL共同考虑了信息增益和累积运动距离
加快路径优化的几个关键点:
- 只考虑机器人当前位置的半径范围内的视点。当R内没有视点时,则考虑R外的视点,以继续探索
- 忽略一些信息增益低的视点(增益的阈值τ)
- 从原有计算结果中查询原有视点距离,增量计算
经过路径优化后,输出路径σ是由相邻视点之间的路径组成的多段线。有必要生成一个更短的无碰撞的局部路径来实时跟踪。用A*算法进行路径平滑,
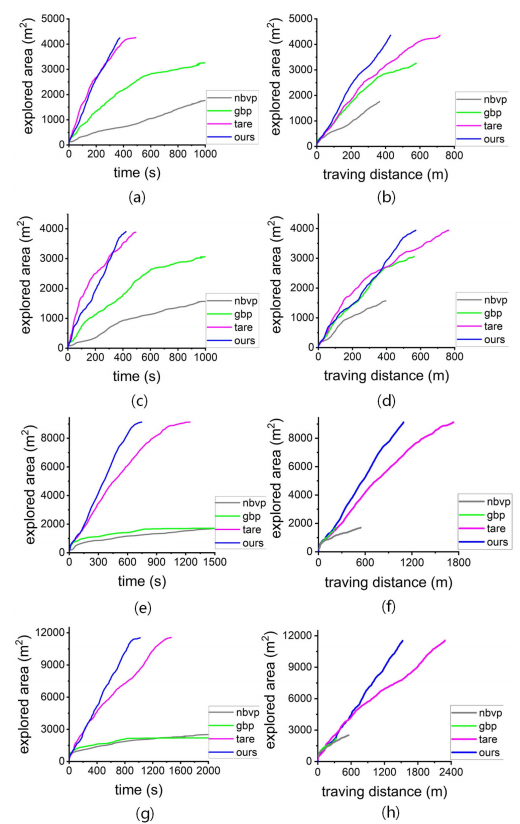
3. 实验
仿真实验
在自行搭建的四个仿真环境中,与NBVP、GBP、TARE进行对比
真机实验

该机器人在305.9秒内探索4573平方米,并以平均1.0 m/s的速度移动306.3米。结果表明,该自主探索框架能够很好地适应真实的地面机器人,并能够有效地探索具有不可达区域的未知环境。
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!