目录
Datta S, Akella S. Prioritized indoor exploration with a dynamic deadline[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021: 3131-3137. 北卡罗来纳大学夏洛特分校 PDF
1. 摘要
观点:当前使用移动机器人的室内探索通常专注于探索整个环境,而不考虑探索过程的时间限制。
预设场景:危险场景(火灾,辐射区域)会对机器人造成损坏,动态估计损坏时间作为deadline,因此机器人必须在有限时间内完成对场景的最大化探索并返回起点。
动态截止日期下的优先级室内探索算法:提出了一种基于优先级的探索策略,使机器人能够在未知的动态截止日期约束下,尽可能多地探索室内环境的几何结构和连通性,并在截止日期前返回起始位置。
探索的基础是首先访问未知环境的高优先级区域,并在时间允许的情况下访问低优先级区域。
2. 方法
任务定义
定义为报警时间,为截止时间。机器人的目标是识别环境连通性并最大化探索当前场景,并需要再的时间内返回到起点。
在每次迭代中,机器人选择一个优先级最高的目标顶点,并计算其成本最小的路径。
2.1 优先级探索算法
将探索环境表示为图形
使用图形模型来表示探索过的环境,其中顶点代表物理位置及其几何和语义信息,根据区域形状为顶点设置标签,例如“走廊”、“小房间”等。边代表可行的路径。使用激光雷达传感器和SLAM算法从机器人的运动和感知数据中生成占据网格图,并将其转化为骨架图作为探索图。
为发现的顶点分配优先级
根据顶点所在区域的类型(如走廊、大房间、小房间)分配不同的优先级,走廊具有最高的优先级,因为它们通常连接了更多的区域,大房间的优先级高于小房间。
使用基于几何的规则分类方法来识别顶点所在区域的类型。
根据是否收到截止日期 ,遵循带有截止日期或不带截止日期的探索算法进行探索
根据是否收到截止日期,采用不同的探索算法。
- 在没有截止日期时,机器人贪婪地选择优先级最高的顶点进行访问。如果有优先级相同的顶点,选择代价最小的点进行探索。
- 在有截止日期时,
- 选择能够在截止日期前返回起始位置的优先级最高的顶点进行访问
- 如果没有足够的时间返回起始位置,机器人尽可能探索最大的区域,直到截止日期。
2.2 仿真环境
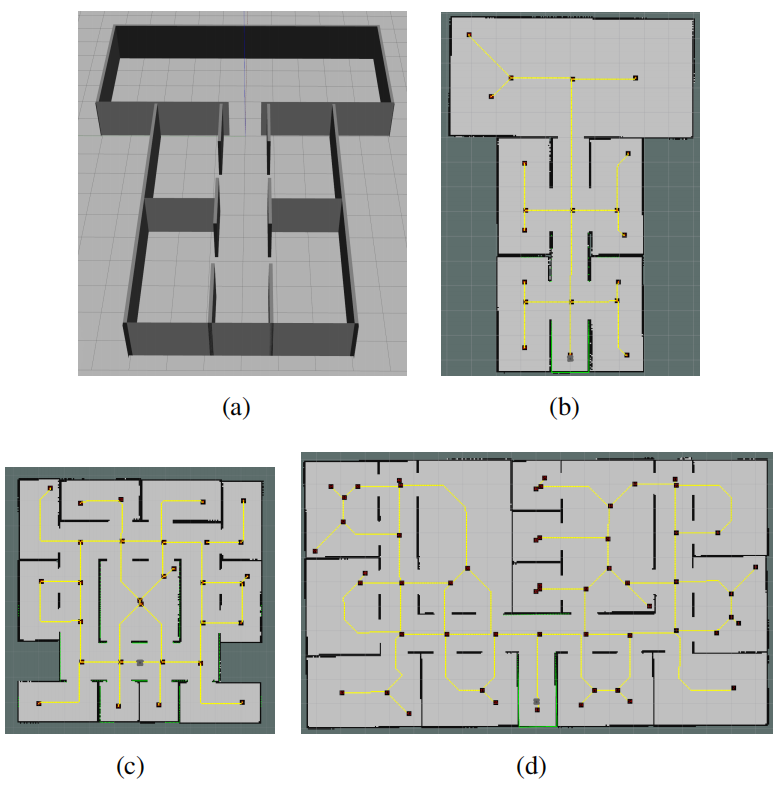
环境搭建
以图表的形式表示三种室内环境

在gazebo中绘制对应的室内场景
评价指标
比较基于成本和基于优先级的探索策略的探索效率,即相同时间内的探索百分比
3. 实验
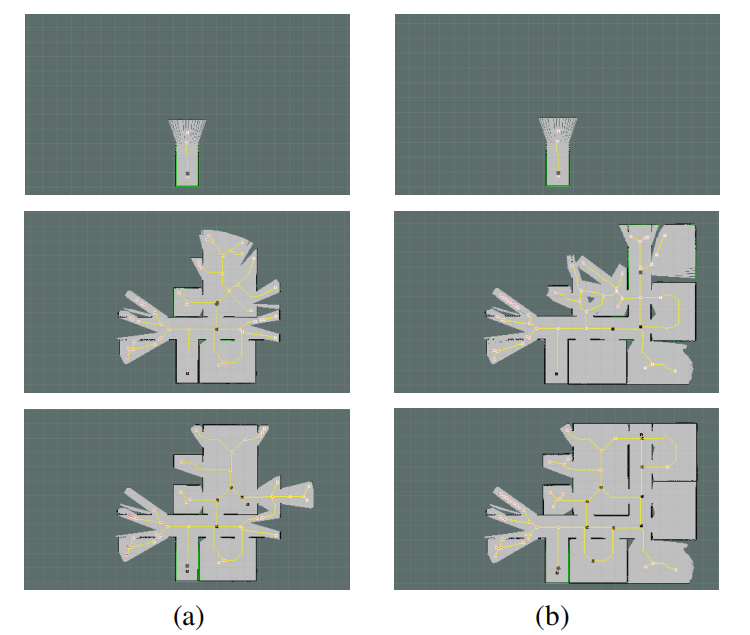
(a)为基于成本的探索策略,(b)为基于优先级的探索策略。在1000秒的时间限制内,(a)探索了37%,(b)探索了56%.

通过轨迹可知,基于优先级的探索会先对所有走廊进行探索,最大化得到场景的结构信息和探索面积
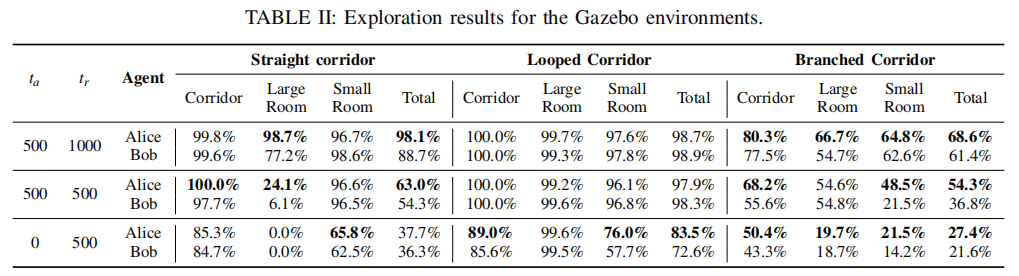
在不同的截止日期下,优先级探索策略在所有环境中都比成本探索策略探索了更多的区域。通过优先访问走廊顶点,优先级探索策略能够更快地发现更多的顶点,从而提高了整体探索百分比。优先级探索策略也能够适应SLAM算法、移动机器人传感器噪声和区域分类错误等挑战。
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!