目录
Li R, Xu J, Fang H. Multi-mode Planning for a Low-cost Robot Effective Exploration[C]//2023 9th International Conference on Mechatronics and Robotics Engineering (ICMRE). IEEE, 2023: 52-57. 复旦大学 PDF
1. 摘要
对于一个探索未知环境和收集周围信息的自主机器人,它必须考虑到传感器测量、定位和规划路径中的不确定性。
存在的问题:在过去的几年里,人们提出了各种机器人探索策略,以获得环境的全覆盖,同时最大限度地降低探索成本;然而,计算复杂性、资源限制和映射质量因素还没有被考虑。
提出了一种低成本机器人的多模式探索策略:
- 一种针对不同环境和任务的多模式探索策略方法
- 由混合规划器为指导的规划策略,将基于边界的概念、基于行为的策略与环境的语义信息相结合
- 提出了分治思想的探索范式
2. 方法
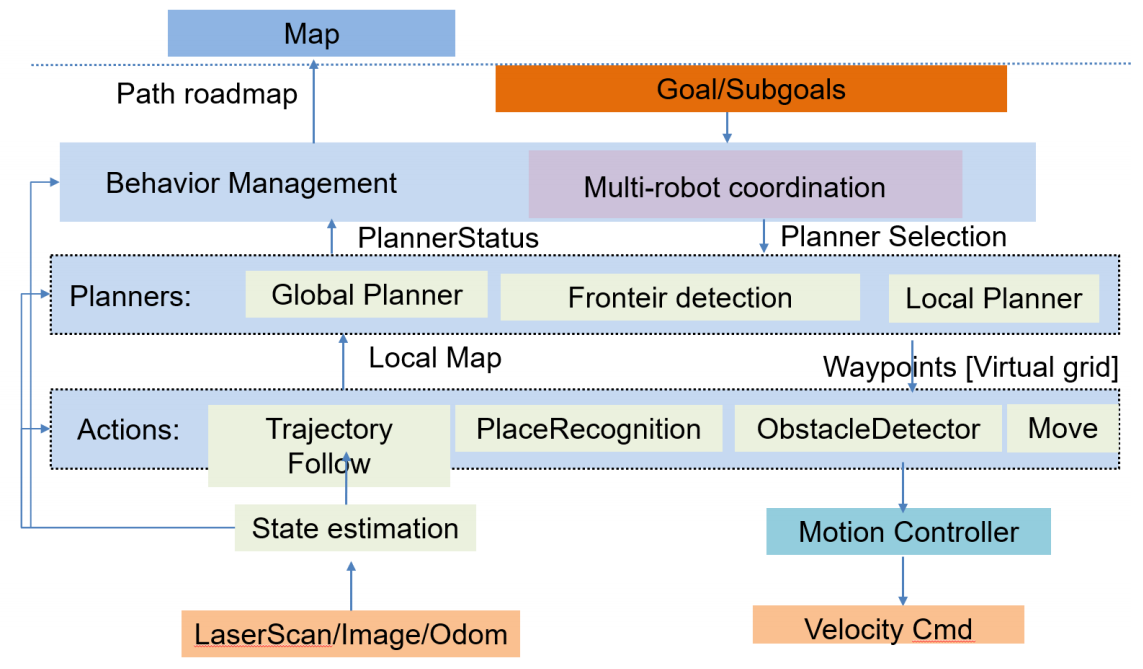
该探索策略的工作流程如上。其中全局规划器和局部规划器可以并行使用,检测边界状态。根据边界状态选择最佳的探索目标,引导机器人进行探索。
2.1 多模式探索
低成本机器人的多模式探索策略:提出了一种根据不同场景(如走廊、房间、隧道等)选择合适的探索模式(如前进、转角、单侧扩展等)的方法,利用虚拟网格和潜在场来指导机器人沿着全局方向探索未知环境。
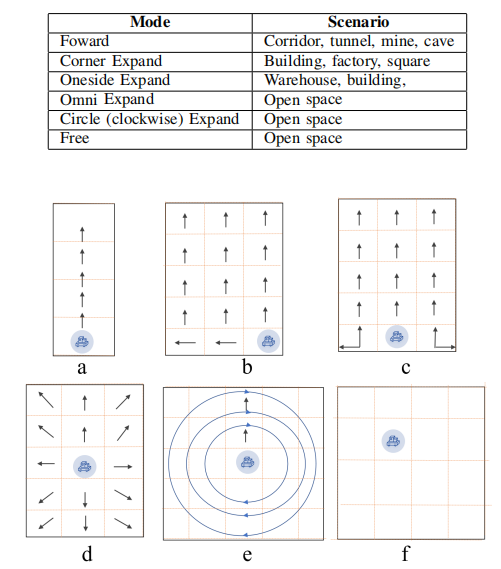
在不同的场景下,模仿人类行为,在每种模式下为机器人保持特定的探索移动方向,从而显著降低探索成本,避免探索过程中重复或重叠的路线。为了指导机器人探索和遵循方向,采用势场来限制机器人的行为和粗糙方向。
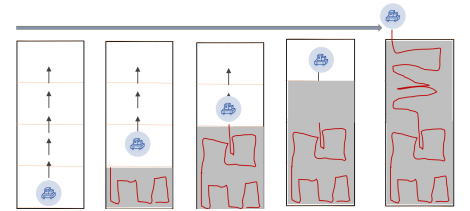
结合粗糙方向,将预期的探索区域划分为小区域。这样,该区域的探索问题就变为了沿全局方向填充虚拟网格。
2.2 边界检测
混合式边界检测方法:结合了局部边界、全局边界和语义边界三种方法,利用RRT算法在传感器范围内寻找未探索区域的边界点,并根据评价函数选择最优的导航目标点。
局部边界:根据传感器扫描范围实时探测机器人周围未探索的空间。
全局边界:采用全局边界检测来识别局部边界探测器的轮廓。全局边界检测的目的是检测贯穿整个地图和远离机器人区域的边界点。在大环境中,随着RRT变大,全局边界探测器会变慢。
语义边界:在机器人周围的语义信息中提取的语义边界。
2.3 语义边界
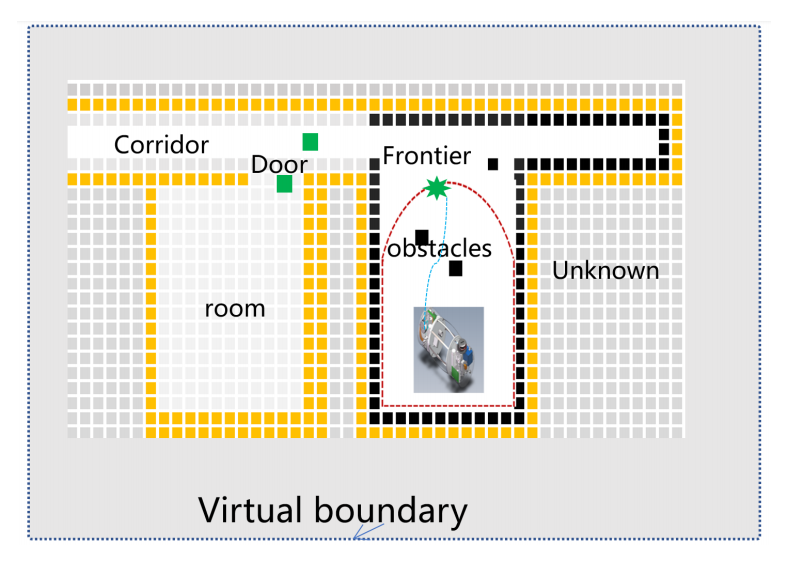
语义信息的利用:利用几何特征和视觉信息对环境进行语义分割,识别出走廊、房间、门、物体等特征,提高了探索行为的优先级和避障能力。
在探索过程中,人类通常会完全探索同一个地方后,才移动到下一个地方。而在某些情况下,当机器人探索一个房间时,获得的最佳边界可能会吸引机器人前往其他地方,导致没有完全探索当前房间。因此有必要提高机器人在特定区域进行探索时,探索行为的优先级。
3. 实验
与TARE比较,表示TARE在探索过程中走了重复的路线,探索区域有重叠,并且需要较大的运算代价,不能被应用在低成本的机器人上。
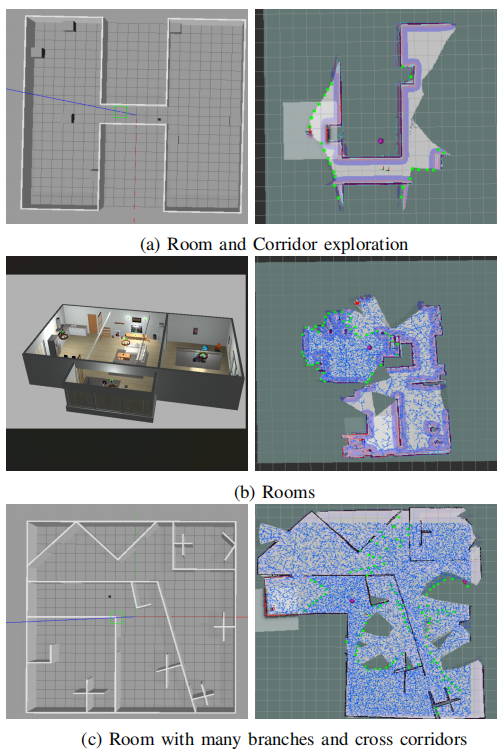
仿真和实验结果:在三种典型的环境中测试了所提出的探索策略,与现有的方法进行了比较,验证了其在降低计算复杂度、提高探索效率和质量方面的优势。(着重体现减少重复探索和低成本机器人)
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!