目录
Yang, Fan, et al. "FAR planner: Fast, attemptable route planner using dynamic visibility update." 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022. PDF
1. 概述
基于可见性图的规划方法
-
主要困难:在构建可见性图时,需要进行大量的计算,特别是在复杂三维环境中。(构建多边形)
-
主要优点:具有快速重新规划方面的优势,以及处理未知和部分已知环境的能力。
贡献点
-
提出一种多边形提取和增量可见性图构建的两层算法框架;
-
该框架能够动态地调整可见性图,以便在未知的环境下进行可尝试的导航并处理动态障碍;
实验结果: 在未知的和部分已知的环境中,达到了基准测试的最先进规划性能。
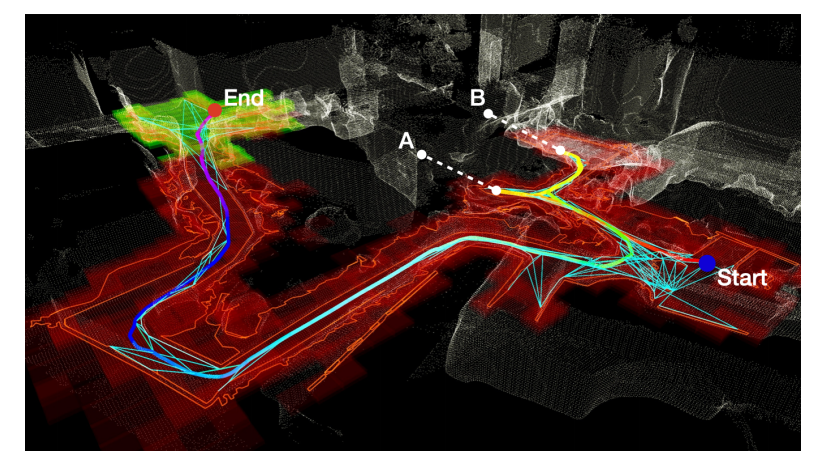
彩色曲线是从蓝点开始到红点结束的车辆轨迹。
青色线:在导航过程中建立的可见性图,用于引导车辆达到目标。
红色区域:观察到的全局环境。
黄色区域:表示用于更新局部图的局部环境。
2. 方法
2.1 障碍多边形的提取与记录
对于地面车辆,通常会在系统中运行一个地形可穿越性分析模块来分析地形特征。该模块从激光雷达或深度摄像机进行距离测量,输出表示障碍物。根据中的数据,构造二值图像,对二值图像做平均过滤,生成模糊图像,由此提取多边形组。从每个多边形中提取顶点,并根据内角清除部分顶点,得到最终的多边形。

2.2 两层可视性图的动态更新
通过增量的方式,只更新车辆附近的区域,由此对可视性图进行逐步更新,将计算均匀地分配到每个数据帧,有效降低了计算代价。
构建局部层: 对于中超过阈值的边,忽略了连接一个或两个多边形的不必要的边,并保留了“传递”边

更新全局层: 在局部上构造局部可见性图后,将局部与全局合并,更新与局部重叠区域的全局区域。
- 对局部图和全局图的顶点进行关联。
- 通过迭代消除离群值关联。
- 对局部边进行合并。

2.3 可视性图的规划
给定当前位置和目标位置,想在可视性图中搜索当前点和目标点之间的最短路径。
- 首先将和添加为全局层上的两个顶点,并将它们连接到具有非阻塞可见性边的中的顶点。
- 在上运行广度优先搜索,如果有路径可用,则找到和之间的最短路径。
2.4 扩展到三维多层可视性图
扩展三维版本的方法是将环境建模为多个水平切片,并提取多层多边形。

3. 实验
实验平台为地面车辆和无人机
实验内容:车辆:室内、室外、大型隧道;无人机:室外
中等尺度、中等复杂的室内环境中的地面车辆模拟:

数据分析:

4. 结论
通过构造可视性图,来实现一个底层的场景图,具有快速重新规划方面的优势,以及处理未知和部分已知环境的能力。
通过分层和增量的方式来降低运算量
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!