目录
Zhou, Boyu, et al. "Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning." IEEE Robotics and Automation Letters 6.2 (2021): 779-786. PDF
1. 概述
存在的问题: 缺乏最优性考虑,进行保守的运动计划和较低的决策频率,导致整体探索效率偏低
贡献点:
- 提出一个逐步更新的FIS(边界信息结构),捕获整个探索空间的基本信息,并进行高频率的探索规划;
- 提出一种分层规划方法,生成有效的全局覆盖路径,进行安全快速的局部运动。
2. 方法
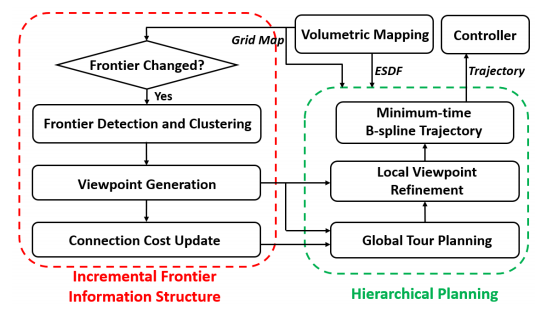
大体流程: 每当使用传感器的测量值更新地图时,都会检查是否有边界集群受到影响。受影响集群的FIS被删除,同时提取新的边界和FIS。随后进行探索规划,先确定全局覆盖路径,再细化局部视点,并依次生成到选定视点的轨迹。如果没有边界存在,则认为探索已完成。
2.1 增量式前沿信息结构
边界探索是通过处理整个地图来检索的,对于大场景和高规划频率是不可扩展的。该论文通过增量的方式来进行边界探索,降低了整体运算量,可以进行更精细的规划。
边界信息结构
当创建一个新的边界集群时,都会计算出对应的边界信息结构FIS。存储集群的所有单元格和对应的平均位置。
增量式边界检测和聚类
通过传感器测量更新地图时,也会记录更新区域的边界框,删除旧的边界簇,通过区域增长算法搜索新的边界簇。如果有大规模的集群,就递归地进行拆分,以便所有的大集群都被划分为小的集群,便于进行局部探测。

视点生成和代价更新
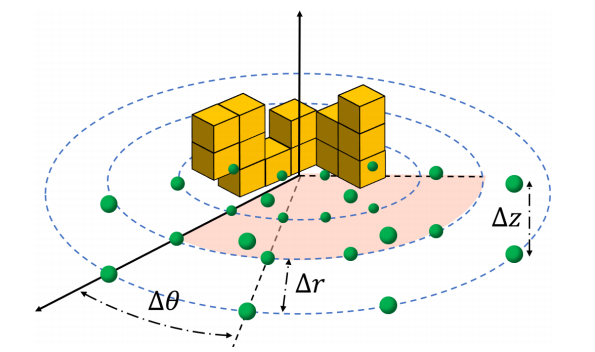
当创建集群时,生成一组视点覆盖它。是通过在原点位于簇中心的圆柱坐标系中的均匀采样得到的。为了进行全局规划,需要每两个集群的连接代价,计算视点之间移动的时间下界;选择覆盖范围最大的视点来计算集群的连接代价。
2.2 分层探索规划

全局探索规划
首先寻找一个全局最短路径,从当前视点出发,覆盖现有的边界集群。通过不对称的TSP问题进行规划。
局部视点细化
全局探索规划找到了一个最短路径来访问所有的集群。但只涉及每个集群的单一视点,并不一定是所有视点中的最佳组合。通过局部视点细化,寻找最优路径。
最小时间B样条轨迹
根据给定离散的视点,生成平滑、安全和动态可行的b样条轨迹;进一步优化B样条曲线的参数,使总轨迹时间最小化。
3. 实验
实验环境: 桥、大型迷宫
探索效率

实验指标统计

4. 总结
在基于边界的探索策略中,加入分层探索思想,通过增量的方式降低运算量,提高了决策频率,并优化局部路径。
状态估计能力需要提高。
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!