目录
Bouman, Amanda, et al. "Adaptive coverage path planning for efficient exploration of unknown environments." 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022. PDF
1. 摘要
覆盖路径规划任务定义:对于一个有时间限制的任务,机器人必须自主探索具有复杂地形的未知环境。随着机器人的移动,传感器不断扩大覆盖范围,或者更广泛地说,扩大与任务相关的世界信息。
该论文提出了一种解决覆盖问题的方法,目的是在任务时间约束下自主探索未知环境,最大化探索面积。
主要思想是:通过使用有效的传感器模型进行未来的覆盖观测,快速找到非近视覆盖路径(非贪婪,考虑长期规划),传感器模型根据周围环境调整覆盖范围和覆盖几率,可以称为自适应覆盖路径规划方法。
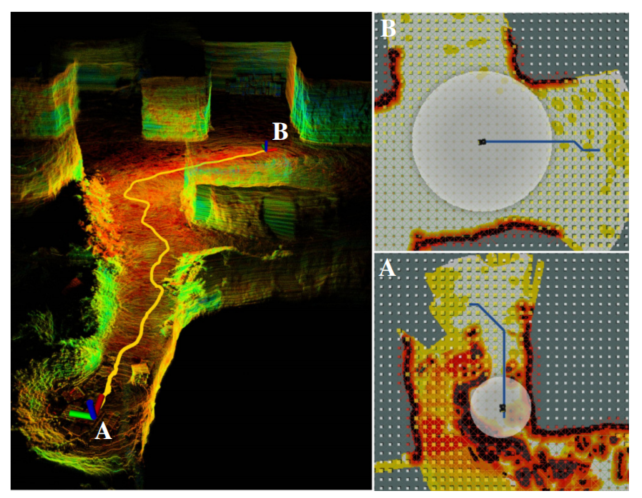
可以观察到,在狭窄区域A,传感器的观测范围较小;在宽阔区域B,传感器的观测范变大。
2. 方法
(只关注了自适应覆盖范围部分)
传感器观测范围有三种情况:
- 静态覆盖范围:假设机器人在一定距离内可以观测到所有的区域。这种模型计算量很小,但是会高估覆盖区域,导致机器人忽略一些未探索的区域,如图中的下方通道。
- 精确覆盖范围:可以最好地反映真实的激光雷达传感器的性能。但是,这种模型计算量很大,不适合用于实时规划。
- 自适应覆盖范围:根据局部环境的空间性质来调整覆盖范围。这种模型既可以减少计算量,又可以更好地逼近真实的覆盖范围,从而提高探索效率和完整性。

全局场景表示
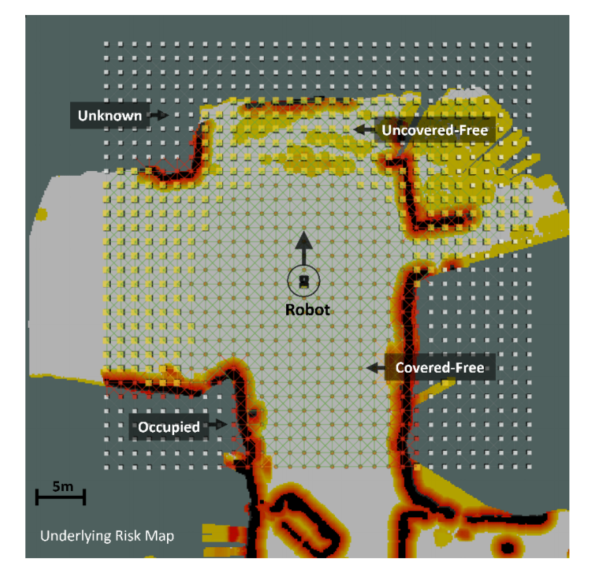
构建信息路线图(IRM)来表示机器人周围的局部环境
IRM包含全局覆盖范围和可穿越性风险信息。覆盖规划器的目标是在IRM上构建路径,将节点从未覆盖的可遍历(黄色)转换为覆盖的可访问(棕色)。通过以后退地平线的方式构建覆盖路径,随着机器人的移动扩展探索空间的边界。
自适应覆盖范围
在给定的时间内,进行的模拟和仿真次数越多,越有可能得到更加可靠的覆盖路径。因此需要在覆盖范围的准确性和模拟次数之间寻找平衡。该论文提出了一种近似的覆盖模型,从而降低了生成模型G(马尔科夫的黑盒模拟器)的时间复杂性。
- 估计了局部环境的间距
- 使用计算自适应的覆盖距离
3. 实验
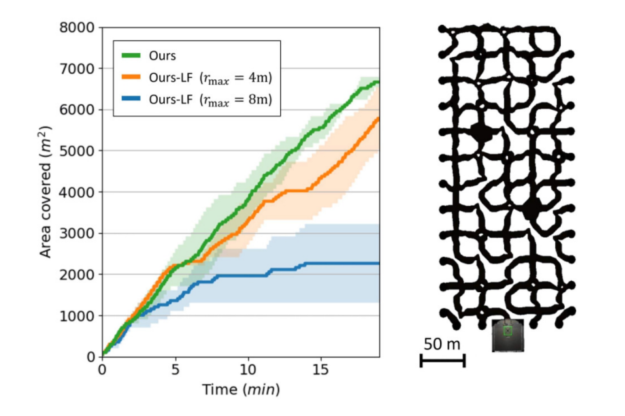
仿真实验
和静态覆盖范围的两个实验进行了对比
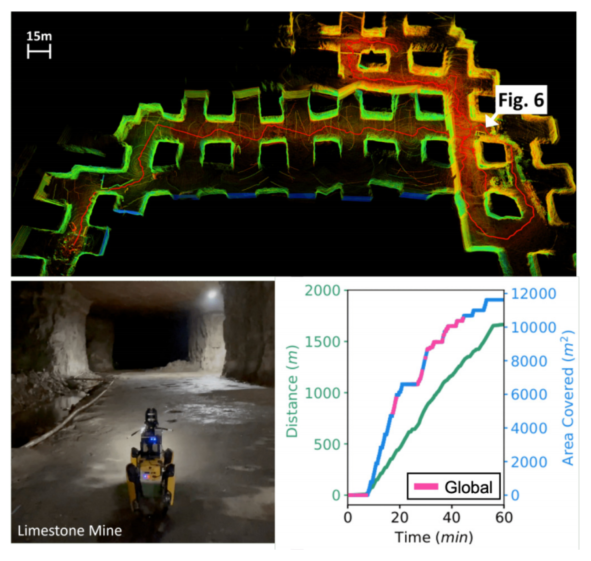
真机实验
使用husky和机器狗进行实验
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!