目录
Sun, Zezhou, et al. "Ada-detector: Adaptive frontier detector for rapid exploration." 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022. PDF
1. 摘要
提出了一种基于自适应快速探索随机树(RRT)的机器人自主探索边界检测方法:
- 检测器可以感测周围环境结构来自适应地调整RRT的采样空间,通过限制RRT的采样空间来提高边界检测的效率
- 通过生成非均匀分布样本,解决滑动窗口中RRT的过采样问题,使RRT有偏于检测新探索区域的边界并实现增量检测。
RRT的思路: 将RRT节点看做视点,计算视点的探索增益,增益大于阈值的称为边界点,根据优先级对边界点进行探索。由于边界检测没有明确的扩展目标,因此会统一扩展到周围区域。
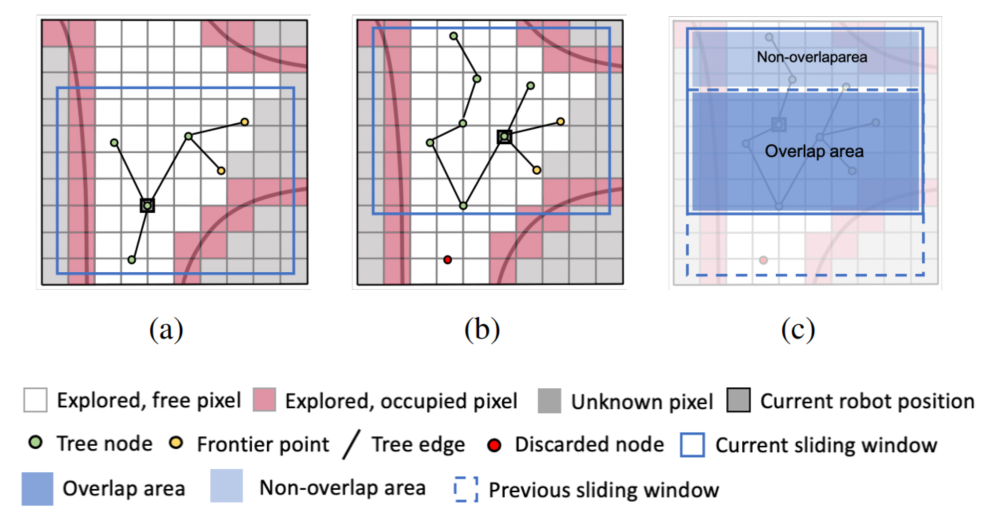
DSVP存在的问题,即过采样:在均匀采样的影响下,在相邻的两个滑动窗口中对重叠区域重复采样两次
2. 方法
在传统的方法中,RRT不受限制,统一扩展,直至覆盖整个探索区域。
DSVP:使用滑动窗口,RRT只需要覆盖当前窗口即可,显著提高了边界检测的效率
该论文:在滑动窗口的基础上增加自适应,并使用非均匀采样,解决了过采样问题,也提高了采样的成功率
2.1 自适应滑动窗口
自适应滑动窗口:将雷达点云和地面坐标对齐,通过遍历雷达点云,计算激光雷达扫描的最小外接矩形的四个角。选定该外界矩形作为当前的滑动窗口,可以提高采样的成功率。
成功采样:采样点可以成功添加到RRT树中
2.2 在自适应滑动窗口中的非均匀采样
为了解决DSVP的过采样问题,提出了非均匀采样策略:将滑动窗口分成新区域和重叠区域,增量式地按比例采样,计算新旧区域各自的采样概率,保证两个区域的采样点比例相同,解决过采样问题。
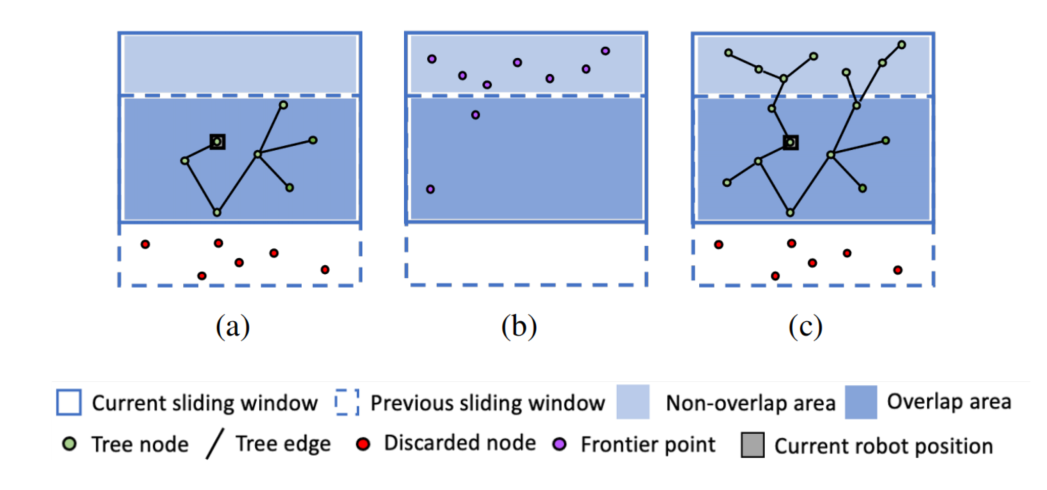
也就是对重叠和非重叠区域分别进行采样,保证两个区域最终的采样点比例相同。
2.3 边界检测
根据非均匀采样所得的采样点,计算每个点对应的探索增益。
如果探索增益大于设定的阈值,那么将该点视为边界点,进行探索。
3. 实验
与DSVP在CMU的三个环境中进行对比
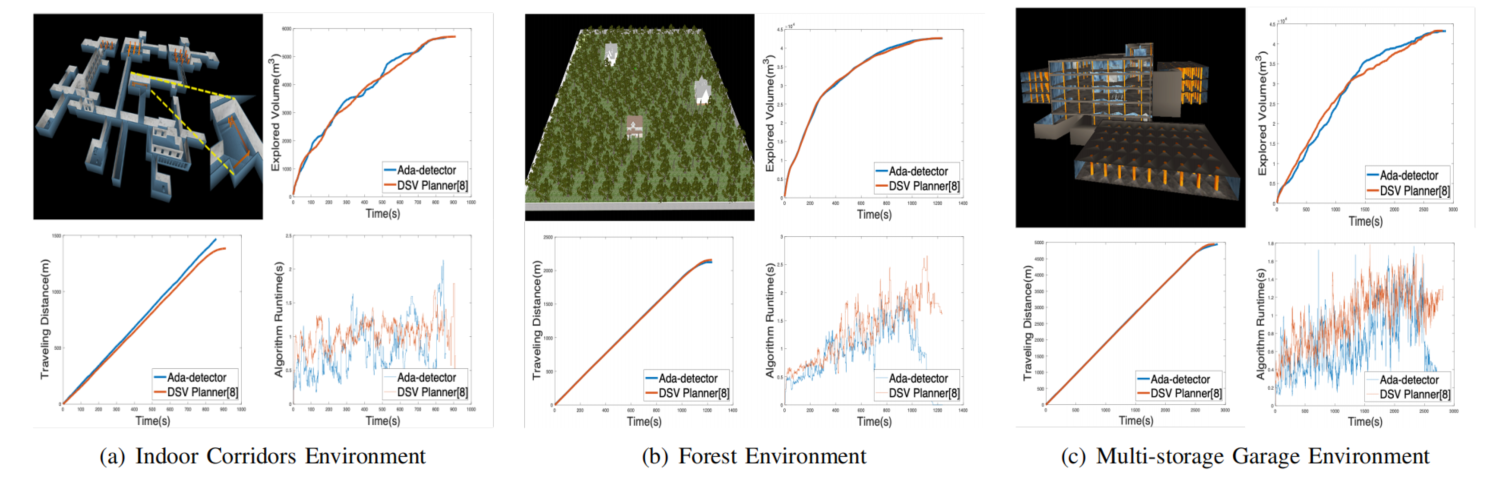
数据分析

成功采样率更高,滑动窗口的持续时间也更短,边界检测的运行时间减少了约40%
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!