目录
Chen X, Zheng J, Hu Q. A Hybrid Planning Method for 3D Autonomous Exploration in Unknown Environments With a UAV[J]. IEEE Transactions on Automation Science and Engineering, 2023. 北航 PDF
1. 摘要
本文研究了无人机在完全未知的三维空间中的自主探索问题,考虑了避障、能耗和运算量的约束。
贡献点:
-
将基于边界和采样的方法进行融合,提出FSHP混合规划算法
-
提出一种边界候选点替代方法来平衡无人机的安全性和探测强度
-
提出一种快速选择重新规划目标的活跃顶点堆栈存储方案
-
提出一种路径点优化算法来生成平滑和动态可行的轨迹
通过仿真和实验,验证了FSHP的有效性和有效性。
2. 方法
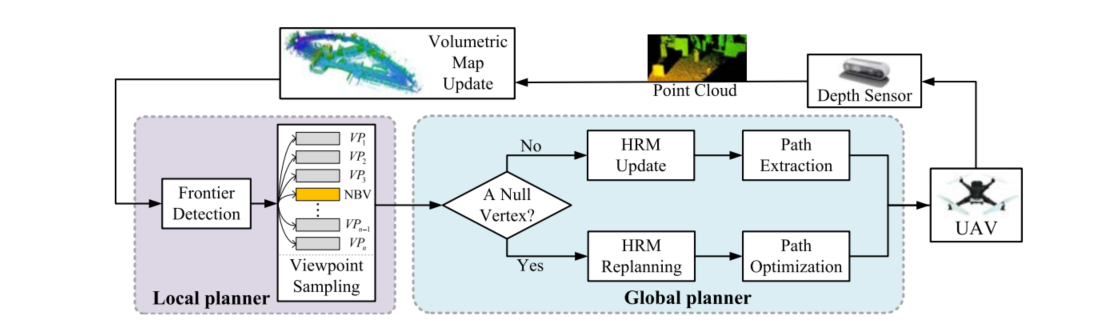
FSHP由局部规划器和全局规划器组成,在局部规划阶段,检测边界并进行抽样,选取候选视点,将信息增益最高的作为目标点。在全局规划阶段,HRM( historical road map)不断与新的顶点相连接,在重新规划探索轨迹的过程中发挥着重要的作用。选取的目标点,需要通过HRM与最近的可见点相连,生成无碰撞路径。如果没有目标点,说明局部区域探索完成,通过HRM规划到最近的活跃节点,直到所有的活跃节点均被删除。
2.1 边界检测
边界点是指与未知空间相邻的自由体素
通过将当前的视点状态与上一次迭代相比,得到状态改变的点,分别根据边界的定义和可见性原则进行判断
2.2 视点采样

为了平衡无人机的安全性和探测强度,预设了一个比例常数k,用于计算一个新的体素vnew。也就是说,采样得到vsam,根据比例常数k计算vnew,将vnew作为最终的采样点。
采样vnew之后,计算该点的最大增益角度。随机采样n次(n为边界点个数),选出具有最大信息增益的vnew。
2.3 HRM更新与重新规划
然而,随着环境复杂性的增加,探索所需的时间也会迅速增加,因此引入了所探索空间的历史信息来提高探索效率。
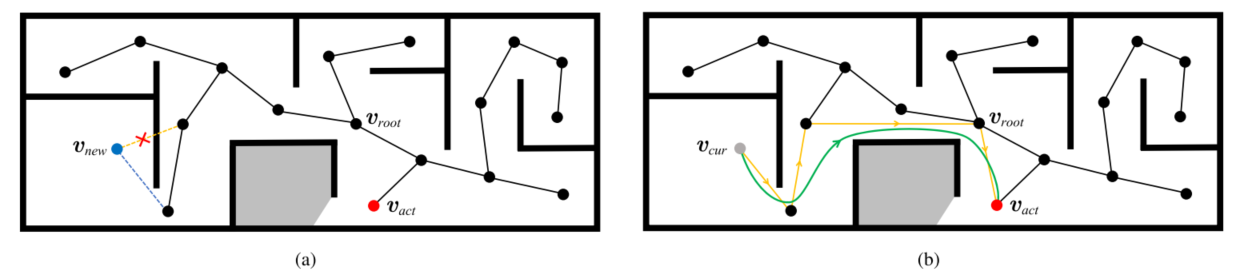
HRM中的所有顶点都是由局部规划器在每次迭代中生成的最佳视点中获得的。随着无人机的探索,HRM会相应地更新。然而,当在当前位置没有更多可用的候选视点时,HRM将重新规划一条路径,继续探索未探索的空间。
(a)更新vnew后,在可见情况下,与最近的顶点做连接。
(b)当局部空间被充分探索之后,通过HRM的重新规划,前往活跃节点的未探索空间,进行后续探索。
活跃节点的堆栈方案

2.4 路径提取与优化

(a)基于HRM中的A*搜索算法,初始提取可行的路径点
(b-c)内部路径点的替换
(d)轨迹平滑处理
3. 实验
仿真实验
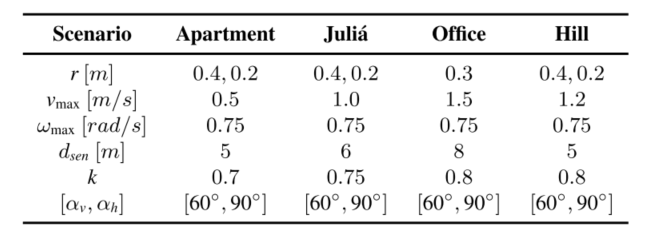
在四个仿真环境中进行了实验,包括了三种室内环境和一种室外环境
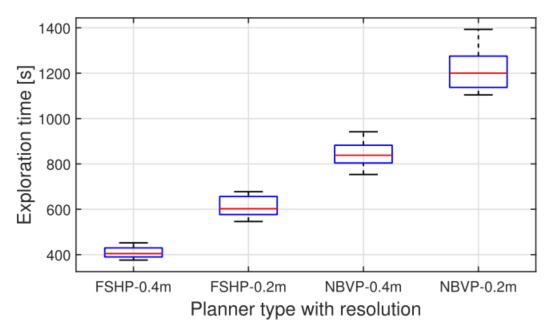
其中的一个实验结果
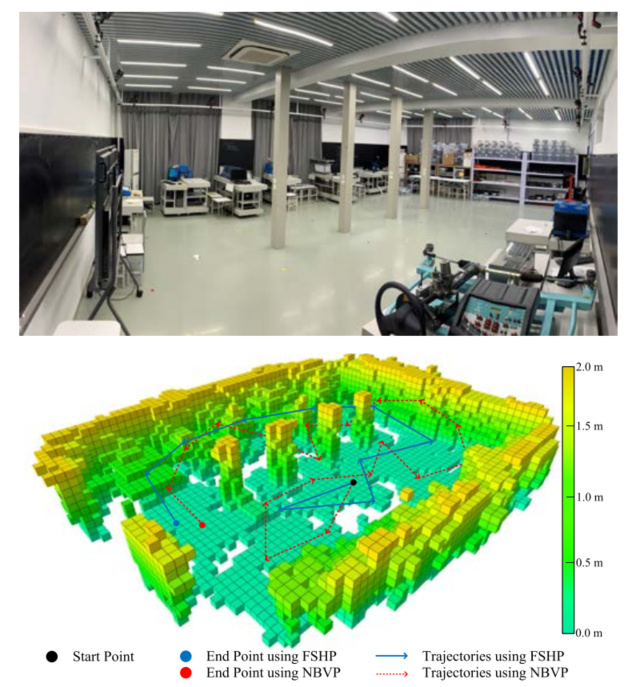
真机实验
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!