目录
Li, Yuxiang, et al. "Object-Aware View Planning for Autonomous 3D Model Reconstruction of Buildings Using a Mobile Robot." IEEE Transactions on Instrumentation and Measurement (2023). 哈工深 PDF
1. 摘要
根据固态激光雷达的特性和机器人的配置,提出了一种生成和评估视图序列的视图规划方法,用于室外地面机器人对建筑物的三维模型重建。
传统的重建需要依赖于测量员的经验和后期处理,而主动映射的方式让机器人能够使用所配备的传感器自动收集测量数据,从而提高了重建的质量。建筑物的三维模型重建需要扫描目标建筑的表面,其中需要对建筑物的实体感知来提取地图中的建筑模型。

思路:采用目标感知的方法将采样区域划分为局部子区域,促进了全局探索的分治策略。通过这样做,视图序列被采样,以有效地覆盖每个子区域内的边界簇。探索每个子区域最终实现目标建筑的整体重建。
贡献点:
- 提出了一种新的对象感知映射表示方法,通过添加实例属性,可以集成各种类型的信息,有效地识别潜在的目标,并提取映射中相应的实体。
- 设计了一种有效重建的分治策略,即利用目标感知对采样区域进行分割,并通过探索多个子区域来完成重建。
- 提出了一种基于边界和采样策略的视图规划重建方案。
- 实验已经在模拟和现场环境中进行,并使用了具有杂乱区域和多个建筑的复杂场景来比较我们的方法和三种最先进的方法。
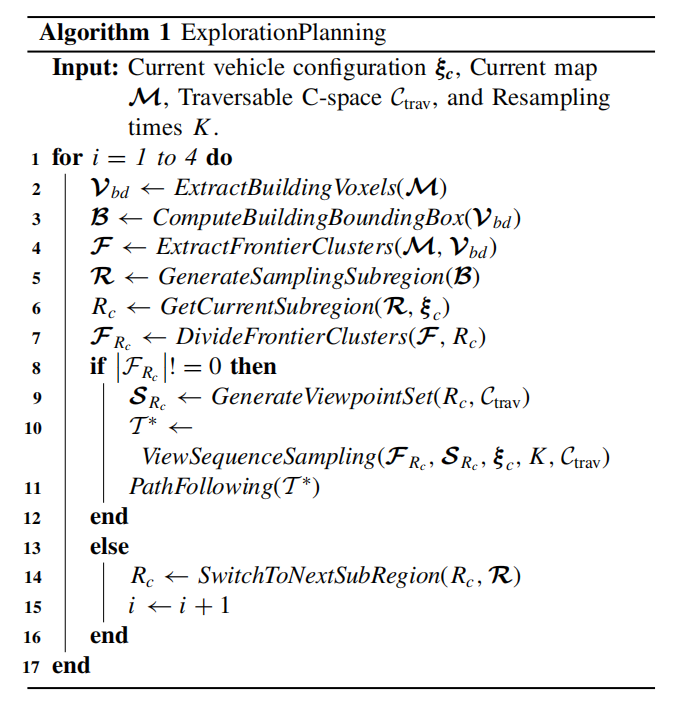
2. 方法
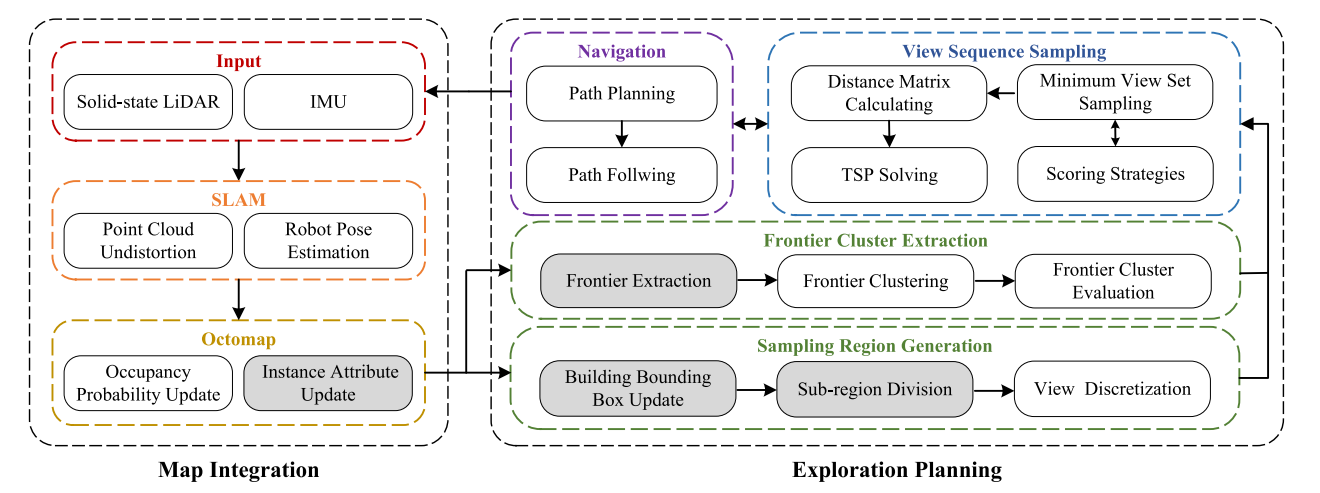
在整个方法中,边界聚类提取、采样区域生成和视图序列采样是探索规划的三个核心步骤
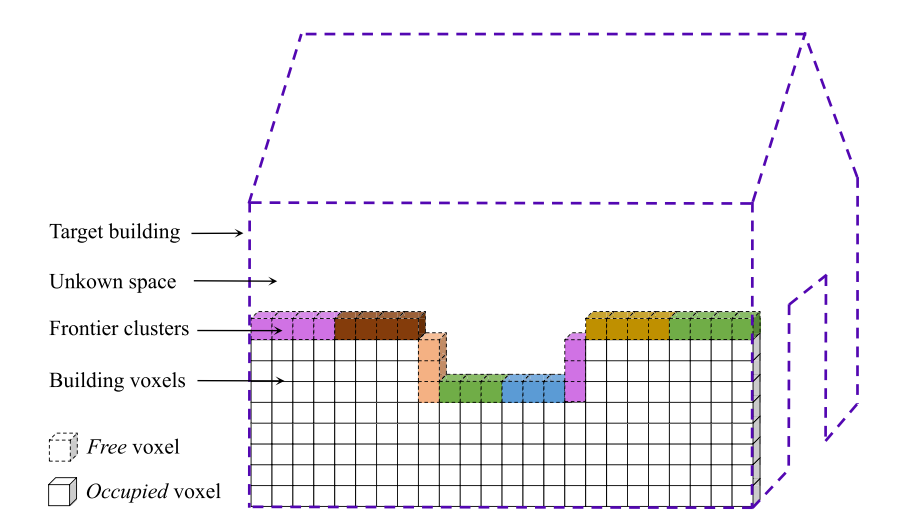
2.1 边界聚类提取
将边界体素定义为相邻体素中有未知体素和建筑体素。
这样边界体素就仅在建筑体素集周围提取,而不是所有被占用的体素。因此,边界体素可以用来指导目标构建的重建,而忽略了无关的对象。
由于相邻的边界体素具有相似的特征,包括曲面法向量和到未知空间的距离,因此该论文采用区域增长方法将所连接的边界体素分组成适当大小的簇。
2.2 采样区域生成
对于大型建筑来说,在整个周边区域采样候选视图并评估所有边界簇采样视图的可见性是困难的。为此,该论文提出了一种分治策略,将采样区域划分为几个具有目标感知的局部子区域,图中不同的颜色就代表了不同的子区域。
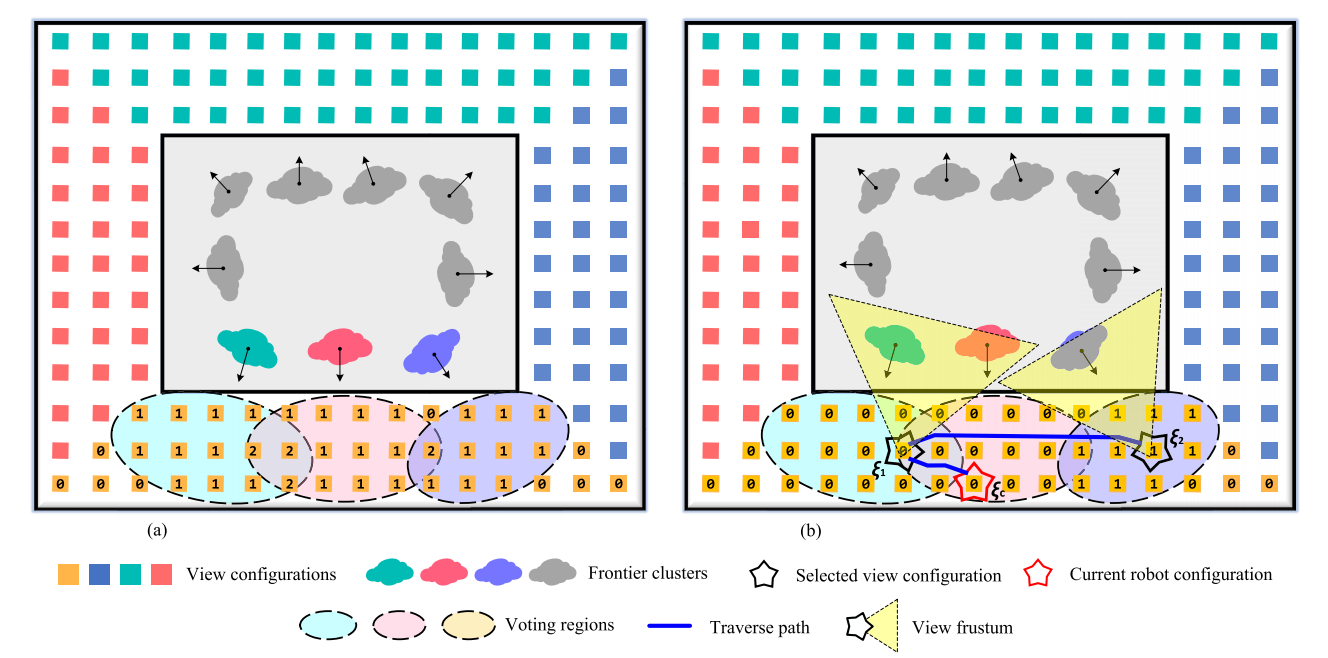
如图(a)所示,在子区域进行均匀采样,视点均匀分布,用对应于子区域的不同颜色表示。视点应在远离障碍物区域时生成,以确保可穿越性。因此,构造一个成本图(即网格图)来表示可遍历空间,其中更靠近障碍物的网格具有较大的成本值。只有成本小于预设阈值的视点才会被添加到视点集中。在重建的过程中,只有完成了当前子区域,才会前往下一个子区域进行探索,采用分治的思想, 避免子区域之间产生干扰。
2.3 视图序列采样
在将采样的视点和边界聚类划分为相应的子区域后,该论文进一步设计了视图序列采样算法。
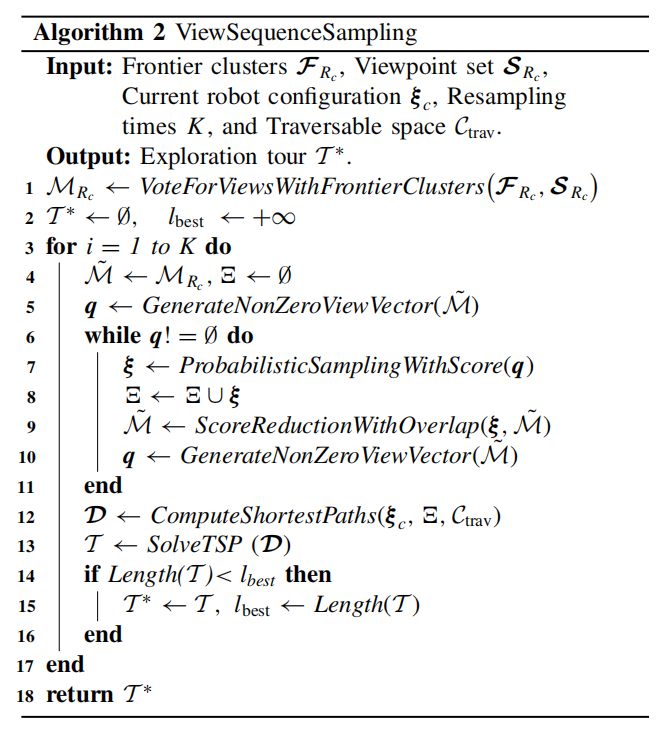
首先对边界聚类簇和视图进行评估,给出对应的分数,然后算法根据相应的分数对视图进行采样。根据图(b),选择视图,并且增加了一个分数衰减机制避免重复观察,也就是说,分数会随着观察的不断减少,直到减少为0。在第二次采样选择了视图后,在当前的子区域中没有留下任何边界簇,并生成了一条遍历所有视图的路由。
找出最短的路径,作为输出结果。
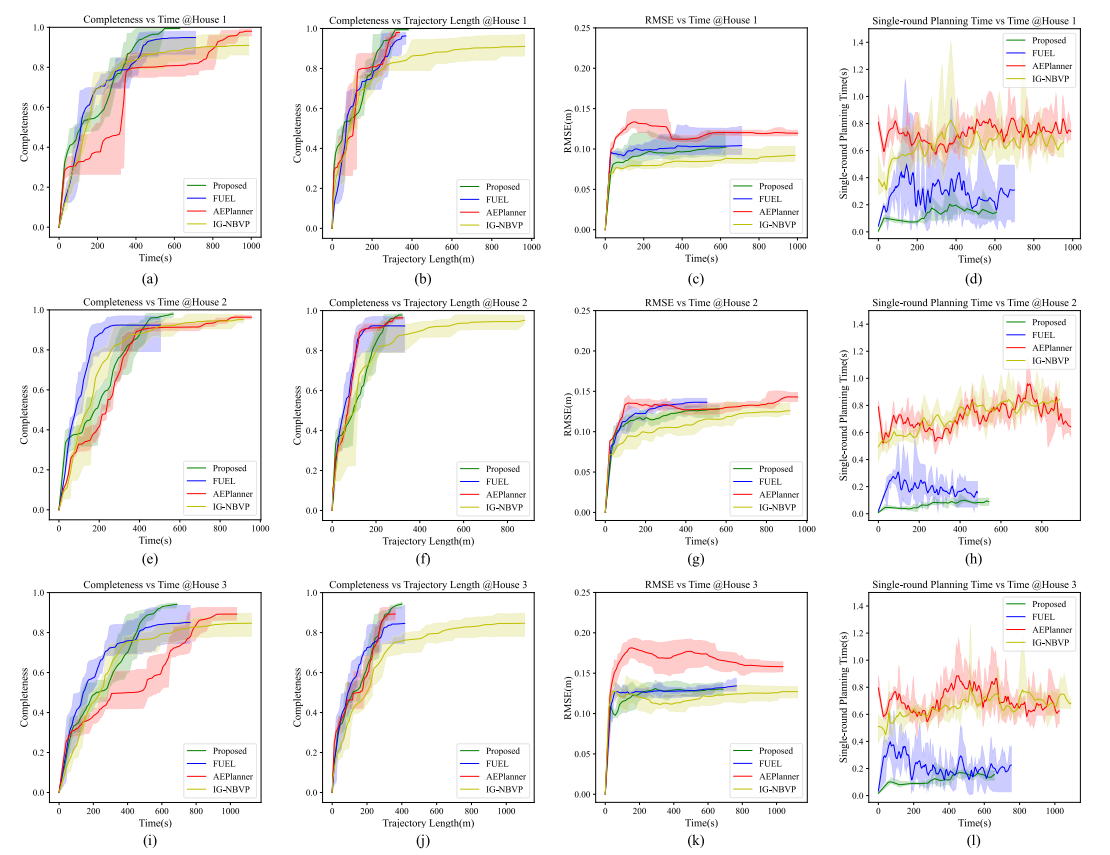
3. 实验
对比实验:IG-NBVP、AEPlanner、FUEL
评价指标:完整性、轨迹长度、根均方误差(RMSE)、单轮规划时间和探索时间
实验结果:
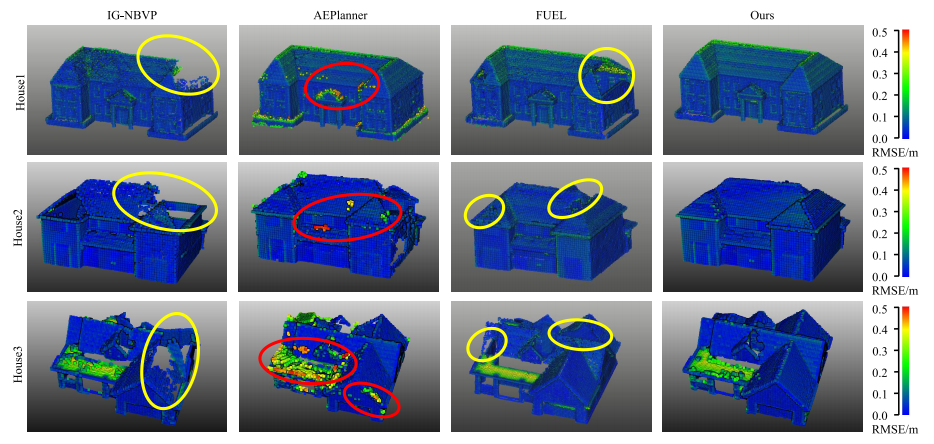
重建效果:
本文作者:southyang
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!